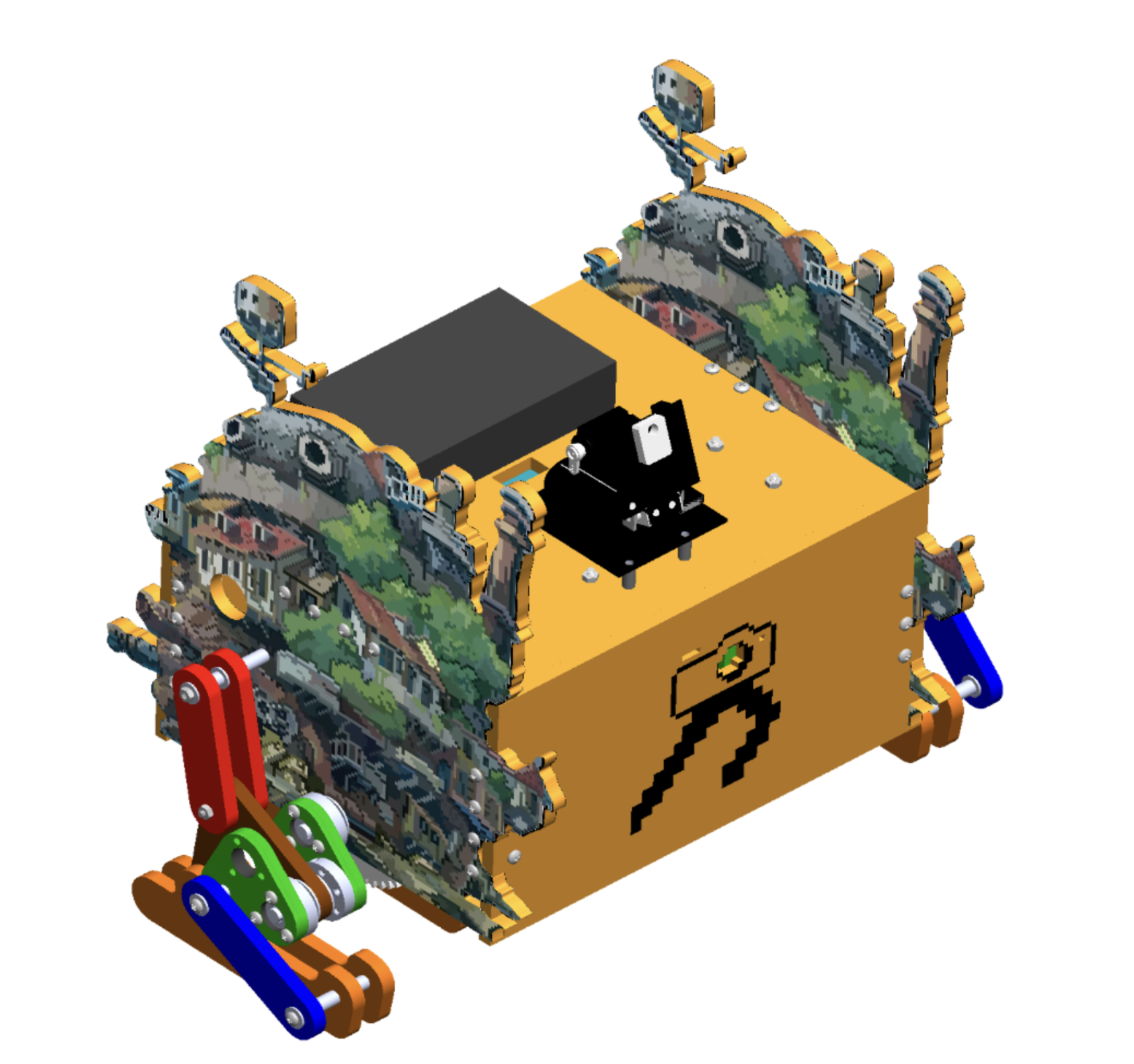
Kinematic Walker
This project involved designing and developing an autonomous line-following robot using an Arduino-based control system with Bluetooth integration. As the Electrical & Control Lead, I programmed and wired the system, troubleshooting issues like motor failures, Bluetooth interference, and material shortages through systematic debugging and resourceful adaptations. The design included SolidWorks modeling, IR sensors for navigation, and adjustments to the center of gravity for stability. Despite setbacks, including a broken IR sensor during testing, the final system successfully demonstrated autonomous movement, showcasing my expertise in embedded systems, electrical troubleshooting, and robotic optimization.